Ubah Bahasa :
software robot kontrol igus
Memprogram, mensimulasikan, dan mengontrol robot tanpa lisensi
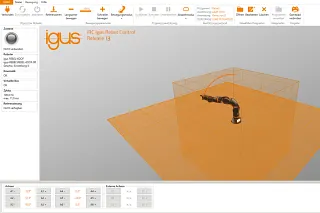
Software Robot Control igus® memungkinkan pemrograman robot dan sistem kontrol yang sederhana dan intuitif, sehingga mudah untuk memulai otomatisasi. Berkat struktur modular, berbagai kinematika robot, misalnya robot delta, robot linear, dan robot yang diartikulasikan multi-sumbu dapat dikontrol. Software ini dapat digunakan untuk mensimulasikan gerakan individu robot pada permukaan 3D - robot tidak perlu dihubungkan untuk stroke ini.
Apa yang akan Anda temukan di halaman ini
Software robot gratis
Contoh pemrograman berbagai aplikasi dengan software robot
- Koneksi sederhana antara robot dan sistem kontrol
- Pengoperasian yang intuitif dengan interface 3D dan kembaran digital memungkinkan eksekusi langsung dan pengecekan urutan gerakan
- Konfigurasi interface kamera dapat dilakukan secara langsung melalui sistem kontrol dan software
- Pemrograman robot arm delta, linear, SCARA, dan artikulasi
- Software memungkinkan pengujian bebas risiko bahkan sebelum pembelian
Persyaratan sistem:
- PC dengan sistem operasi Windows 10
- Komunikasi melalui Ethernet atau WLAN
- Ruang disk kosong sebesar 500MB
Contoh program, wiki, dan kursus pelatihan



Interfaces
Interface PLC
Interface PLC (PLC = Programmable Logic Controller) yang memungkinkan pelaksanaan fungsi dasar dan pensinyalan status melalui input dan output digital. Selain kontrol oleh PLC, interface ini juga memungkinkan pengoperasian melalui tombol hardware.
Inputs dan outputs digital
Program robot dapat dimuat dan dijalankan, dan perintah gripper dapat dikirim melalui input digital atau sinyal global. Ini berguna, misalnya, jika sebuah program harus dipilih dari pilihan yang diberikan menggunakan tombol atau instruksi CRI-GSig.
Modbus TCP/IP
Interface Modbus TCP dapat digunakan untuk mengirim data dan instruksi PLC ke sistem kontrol robot dan menerima informasi status, misalnya.
Interface CRI
Interface CRI memungkinkan instruksi yang rumit dikirim dan informasi serta pengaturan diambil melalui interface Ethernet menggunakan TCP/IP. Kontrol Robot igus® menggunakan interface ini untuk terhubung ke robot dengan sistem kontrol yang terintegrasi atau contoh sistem kontrol lainnya.
Interface kamera
Interface kamera yang memungkinkan penggunaan deteksi objek dan kamera video. Kamera pendeteksi objek mengenali posisi dan kelas objek dan mengirimkannya, secara opsional dengan gambar video, ke sistem kontrol. Sistem kontrol menghitung posisi dalam sistem koordinat robot dari posisi objek kamera. Kamera video murni hanya mengirimkan gambar dan oleh karena itu hanya dapat digunakan untuk memantau area kerja, tetapi tidak untuk mendeteksi objek.
Cloud
Interface Cloud memungkinkan robot untuk dipantau melalui RobotDimension. Setelah diaktifkan dan masuk, robot mengirimkan informasi status dasar dan gambar kamera ke layanan online. Pengguna dapat mendaftarkan robot mereka di situs web dan mengambil informasi.
ROS, Matlab, LabView, dan masih banyak lagi.
Mengintegrasikan robot ke dalam lingkungan ROS Anda. Dokumentasi dan paket untuk komunikasi hardware, Teleop dan moveI
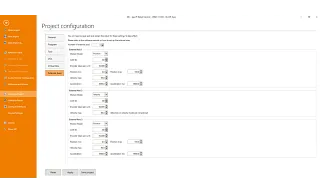
Konfigurasi proyek
.
Gripper
Alat yang dirakit dapat ditentukan di sini. Mengubah alat memerlukan proyek yang dimuat ulang atau sistem kontrol terintegrasi dimulai ulang. Alat baru dapat didefinisikan sebagai file konfigurasi di direktori "Data/Tools"
.
Kotak virtual
Kisaran pergerakan robot arm dibatasi oleh pengaturan kotak virtual. Fungsi ini membantu mencegah kerusakan mekanis dan menyederhanakan pemrograman, tergantung pada aplikasinya. Jika program dijalankan yang melanggar kotak virtual, program akan dihentikan dengan pesan kesalahan.
.
Sumbu eksternal
Sistem kontrol robot mendukung hingga 3 sumbu tambahan (juga disebut "sumbu eksternal" di iRC). Sumbu-sumbu ini dapat dipasang sesuai dengan sumbu robot dan dikonfigurasikan melalui area konfigurasi iRC.

.
Program
Di sini Anda dapat menentukan program robot dan logika, kecepatan gerakan (sebagai persentase dari kecepatan maksimum), mode pemutaran, dan reaksi terhadap kesalahan program.
.
Kinematika khusus
Sistem kontrol robot dapat disesuaikan untuk robot Anda dengan kembaran digital. Kami mengonfigurasi kinematika terbalik agar sesuai dengan bisnis proyek Anda.
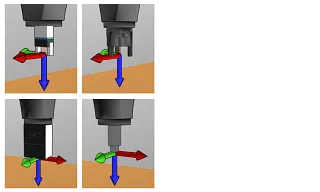
Pemrograman
.
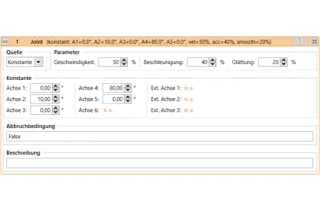
Gerakan sumbu
Perintah sambungan yang menggerakkan robot ke posisi target absolut yang ditentukan dalam koordinat sumbu (misalnya sudut sumbu atau posisi sumbu linear). Pergerakan yang dihasilkan dari TCP biasanya berupa kurva dan bukan garis lurus.
.
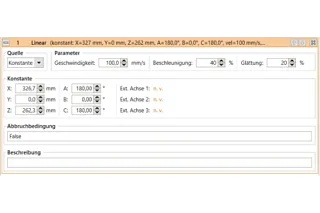
Gerakan linear
Perintah Linear menggerakkan robot ke posisi target absolut yang ditentukan dalam koordinat Cartesian. Pergerakan yang dihasilkan TCP mengikuti garis lurus.
.
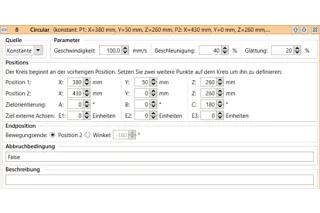
Gerakan melingkar
Instruksi "Gerakan melingkar" memungkinkan gerakan di sepanjang jalur melingkar penuh atau sebagian. Ini kompatibel dengan gerakan linear sehingga transisi dari dan ke gerakan linear dapat diperhalus.
.
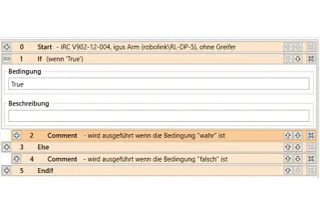
Kondisi
Kondisi dapat digunakan dalam perintah jika-maka-lalu, perulangan, dan sebagai kondisi pembatalan dalam perintah gerak. Kondisi dapat berupa kombinasi input digital, sinyal global, operasi Boolean, dan perbandingan.
.
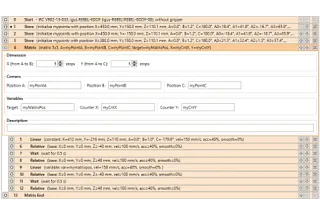
Perhitungan matriks
Instruksi grid menghitung posisi yang disejajarkan dengan grid, misalnya sebagai posisi mencengkeram atau menyimpan untuk tugas pembuatan palet.
.
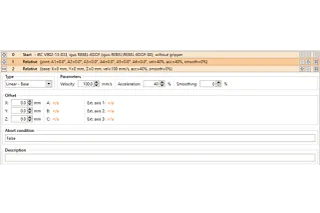
Relatif
Perintah Relatif memungkinkan Anda untuk menggerakkan robot relatif terhadap posisinya saat ini. Perintah ini dapat diakses melalui item menu di bawah "Action" → "Pergerakan relatif".

.
Sub-program
Sub-program dapat dipanggil dengan sub-perintah. Jalur ke file sub-program ditentukan di bawah "Nama file". Ini relatif terhadap subfolder "Program" dari folder iRC "Data".
.
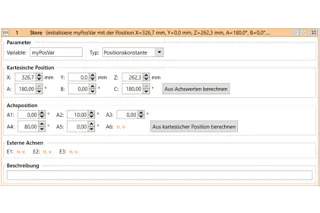
Variabel dan akses variabel
Dua jenis variabel didukung dalam program untuk igus® Robot Control dan TinyCtrl:
- Variabel angka: Variabel ini dapat digunakan untuk menyimpan bilangan bulat atau bilangan titik mengambang.
- Variabel posisi: Variabel ini dapat digunakan untuk menyimpan posisi Cartesian dan posisi gabungan. Apakah variabel tersebut ditafsirkan sebagai posisi Cartesian atau posisi gabungan tergantung pada konteksnya.
Unduh software robot

.
Software Robot Control igus® yang bebas lisensi diintegrasikan ke dalam sistem kontrol dan oleh karena itu menggunakan konsep operasi standar dan layanan komunikasi yang konsisten untuk banyak komponen dari satu sistem. Ini berarti lebih sedikit pekerjaan perencanaan proyek dan komisioning yang lebih cepat.
- Uji semua kinematika igus® terlebih dahulu dalam software
- Dengan proyek yang telah diprogram sebelumnya untuk semua robot igus®, sumbu tunggal, dan kendaraan berpemandu otomatis
- Interface 3D yang intuitif dengan simulasi robot
Konsultasi
Saya akan dengan senang hati menjawab pertanyaan Anda secara langsung

Pengiriman dan konsultasi
Secara pribadi:
Senin - Jumat dari jam 8.30 - 17.30 WIB
Online:
24 Jam
WhatsApp-Service:
Senin - Jumat dari jam 8.30 - 17.30 WIB